
 Micromotores
Micromotores


OpenManipulator es un robot ideal para universidades donde se quiera desarrollar investigación o aprender a cerca de brazos robóticos, este brazo soporta diferentes tipos de software entre los cuales están ROS (robotic Open Software) que es uno de los software abiertos de robótica mas usado en el mundo, adicionalmente puedes usar Arduino con las librerías listas para el manejo de los servomotores y processing para generar diferentes tipos de interfase
Este robot esta diseñado por robotis y usa servos tipo Dynamixel – X los cuales ademas de tener retroalimentación de posición velocidad, etc pueden programarse y tiene un mejor despeño que los AX-12
Características:
- Servos DYNAMIXEL XM430-W350-T
- Alimentación 12V
- 5 grados de libertad (4DOF + 1DOF Gripper)
- Carga máxima 500g
- Velocidad máxima de giro 46RPM
- Peso 700g
- Longitud 380mm
- Apertura del gripper: 20~75mm
- Interface TTL Multi Drop BUS
- Software ROS. DYNAMIXEL SDK, Arduino, Processing, Matlab
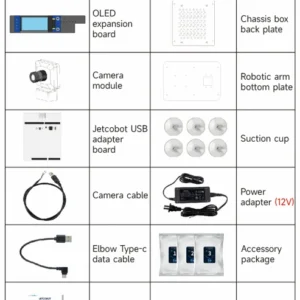
El robot incluye
- Libro de programación ROS (digital en ingles tiene un capitulo donde explica el uso open manipulator)
- Fuente de alimentación
- Sistema de control OPEN CR
- U2D2 Power Hub Board
- U2D2
- Base metálica para anclarlo
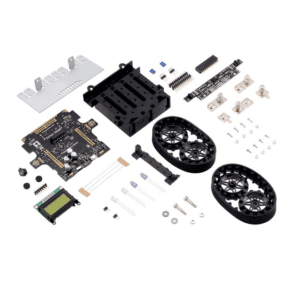
- Partes necesarias para armar el robot
Link de interés
- e-Manual : http://emanual.robotis.com/docs/en/platform/openmanipulator/
- Drawing (OnShape)
- Drawing (Thingiverse)
- Source Code
- ROS WIKI
- Assembly Manual



















Valoraciones
No hay valoraciones aún.