
 Micromotores
Micromotores



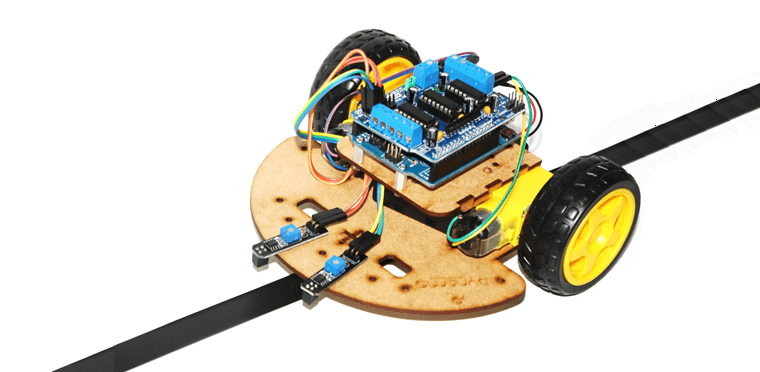
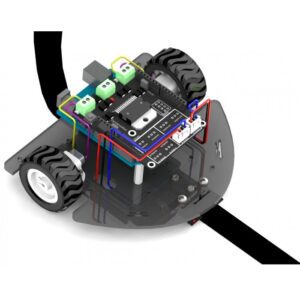
Este seguidor de linea de bajo costo es ideal para aprender robótica, la plataforma es de MDF el cual es fácil de modificar si quieres hacer algún cambio, y la programación se hace con software arduino que es muy fácil de usar, todas las partes se pueden reemplazar en caso de que se pierda o se dañen y tiene un manual de usuario para armarla.
Este robot viene en 2 versiones
- Versión armada: Listo para poner baterías y usar con un programa básico que puedes ir optimizando
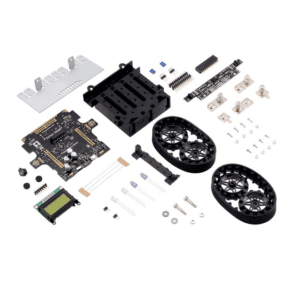
- Versión desarmada: Vienen todas las partes para que tu mismo lo armes, se envían los motores, la shield de motores y el elevador con los cables soldados.
Características
- Programación con Arduino, con la board puedes aprender arduino y hacer otros proyectos
- Plataforma de madera expansible la puedes usar para robots de laberintos, entre otros
- Dos motorreductores DC
- Rueda de apoyo de madera (para mejor rendimiento se puede usar una rueda de apoyo mini SKU 5-03-31)
Partes
- 1 x Plataforma en MDF para robot seguidor linea (Click Aqui)
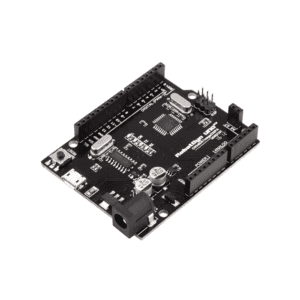
- 1 x Board compatible arduino SMD (Click aqui)
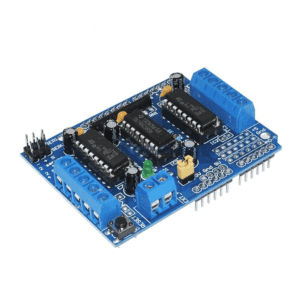
- 1 x Board control motores Motor shield (Click aqui)
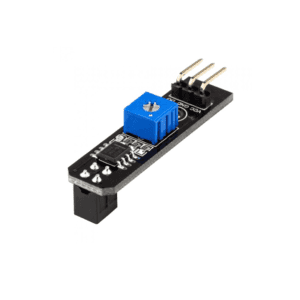
- 2 x sensores de linea con tornillo para firjarlo (Click aqui)
- 3 x base metálica hexagonal 9mm (Click aqui)
- 1 x Juego Cables (6 H-H para los sensores y 4 H-M para motores) (Click aqui)
- 1 x portabaterias 18650
- 1 x cargador 18650 por USB
- 2 x baterías 18650






































Valoraciones
No hay valoraciones aún.