
 Micromotores
Micromotores


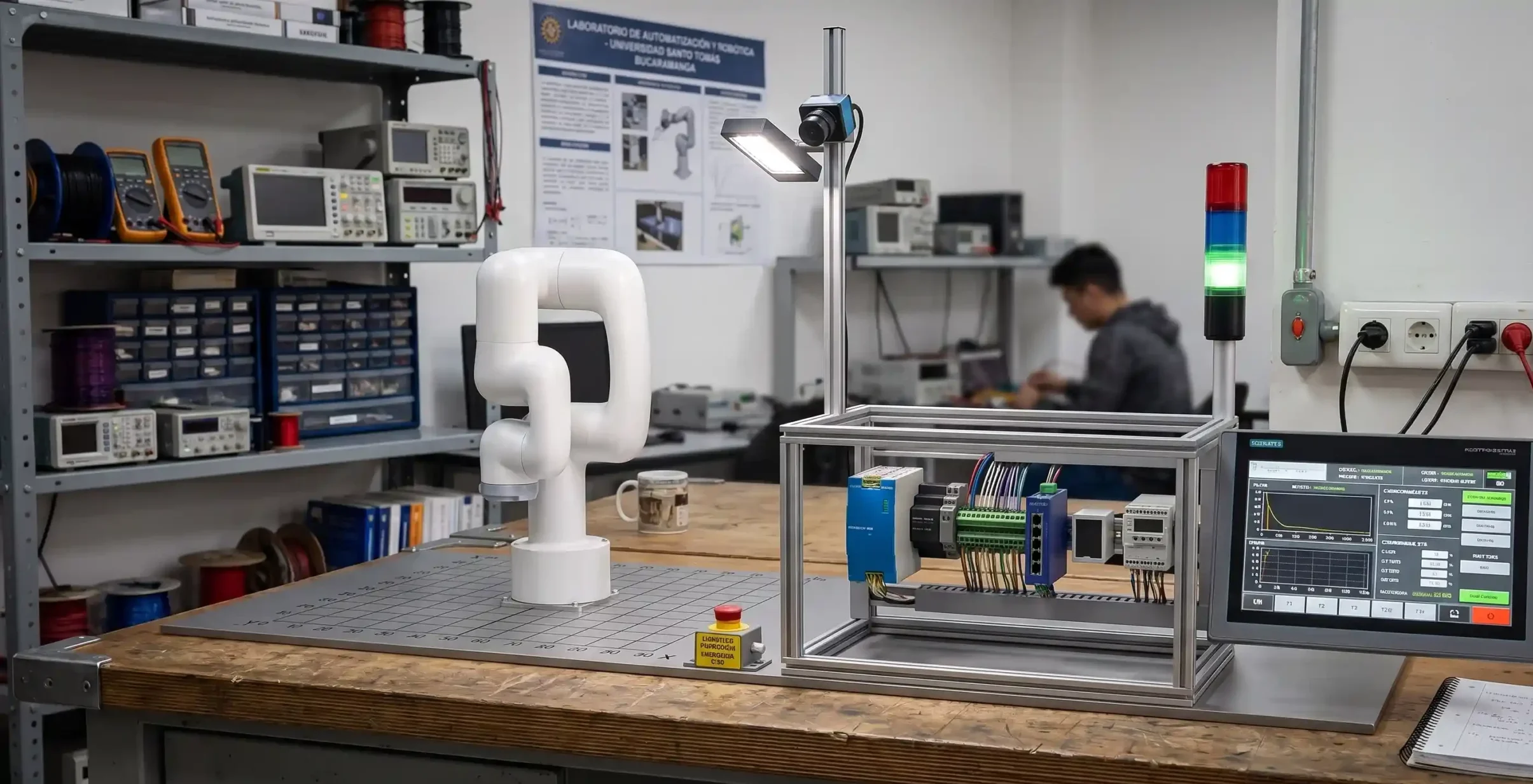
La Celda de róbotica de Dynamo Electronics es una plataforma robótica modular diseñada para laboratorios universitarios de ingeniería. Integra un brazo robótico colaborativo UFACTORY Lite 6 de 6 grados de libertad, una cámara de visión artificial Luxonis OAK-D PoE con inteligencia artificial embebida, un sistema de orquestación basado en CM5, y un controlador de I/O industrial PLCstamp con comunicación Ethernet, todo interconectado bajo una arquitectura de Industria 4.0 real con protocolo MQTT como bus de datos unificado.
El concepto central es modularidad: la celda funciona como una pieza de lego industrial. Se entrega como una plataforma base lista para operar, y se adapta a diferentes procesos productivos (pick & place, ensamblaje, clasificación, inspección visual, paletizado) sin modificar el hardware principal. Un solo equipo cubre al menos 4 asignaturas de ingeniería.
Características
- Brazo robótico: UFACTORY Lite 6, 6 ejes, 600g de carga útil, ±0.5mm de repetibilidad, 440mm de alcance, CPU integrada.
- Herramientas: Gripper eléctrico de 2 dedos (16mm apertura, 5N) + Gripper de vacío (-40kPa), intercambiables manualmente.
- Visión artificial: Luxonis OAK-D PoE, 4 TOPS de procesamiento AI on-device, stereo depth 3D, alimentada por PoE (un solo cable).
- Orquestador: CM5 (Raspberry Pi5), 4GB RAM, 32GB eMMC, Gigabit Ethernet, corre simultáneamente broker MQTT, gateway robot, secuenciador Python y dashboard Node-RED.
- Controlador I/O: PLCstamp de M5Stack con base Ethernet W5500 (cableado, no WiFi), GPIO para sensores y actuadores de campo.
- Pantalla HMI: Display táctil de 15.6 pulgadas conectado por HDMI y USB al CM5, muestra dashboard Node-RED en tiempo real.
- Señalización: Baliza industrial de 3 colores (verde, amarillo, rojo) controlada por MQTT.
- Red: Switch industrial de 5 puertos Ethernet + inyector PoE 802.3af. Un solo cable de uplink conecta la celda al switch del laboratorio.
- Alimentación: Fuente Meanwell 24V DC / 20A (480W)+ sistema de protección AC.
- Rack: 50×25×25 cm, paneles laterales y superior en acrílico perforado para ventilación, frontal abierto para acceso del usuario.
- Comunicación: MQTT como protocolo unificado. Todos los dispositivos publican y suscriben tópicos a un broker centralizado.
- Seguridad: Botón de parada de emergencia incluido con el Lite 6, conexión directa al robot.
Arquitectura de Industria 4.0
La celda implementa las 4 capas fundamentales de Industria 4.0:
- Capa física: Lite 6 + OAK-D PoE + PLCstamp + sensores y actuadores de proceso.
- Capa de comunicación: MQTT como bus de datos unificado sobre Ethernet, con un broker Mosquitto centralizado en el CM5.
- Capa de orquestación: CM5 ejecutando simultáneamente broker MQTT, gateway xArm SDK ↔ MQTT, secuenciador Python, y dashboard Node-RED.
- Capa de supervisión: Dashboard para la pantalla de 15.6 pulgadas con monitoreo en tiempo real de toda la celda, accesible desde cualquier laptop en la red del laboratorio.
Impacto académico — formamos al ingeniero del 2030
Esta celda no enseña solo herramientas de hoy, prepára al estudiante para tecnologías que aún no están implementadas hoy donde los fundamentos ya están aquí. Cada materia tiene dos dimensiones: lo que aprende hoy (competencia inmediata) y lo que eso le habilita mañana (competencia futura).
- Robótica Industrial: Ing. Mecatrónica · Ing. Electrónica · Semestres 7-9
Programación de brazos colaborativos, cinemática, planificación de trayectorias, y control de movimiento en entornos de manufactura real.
Aprende hoy: Cinemática directa e inversa. Parámetros DH. Planificación de trayectorias punto a punto y lineales. Programación en Python con SDK industrial. Control de gripper y herramientas. Workspace y singularidades.
Lo prepara para mañana: Cobots en manufactura flexible. Programación de robots por demostración (lead-through). Integración robot-sensor en celdas autónomas. ROS2 como estándar de la industria robótica. Robótica cognitiva donde el robot toma decisiones basadas en datos de sensores.
- Inteligencia Artificial y Edge Computing: Ing. Electrónica · Ing. Sistemas · Ing. Mecatrónica · Semestres 8-10
Modelos de IA ejecutándose en el borde (edge), no en la nube. Detección de objetos, clasificación, y toma de decisiones en tiempo real con hardware embebido.
Aprende hoy: Detección de objetos con YOLO en hardware embebido (OAK-D, 4 TOPS). Visión estéreo y estimación de profundidad 3D. Clasificación por color y forma. Calibración cámara-robot (hand-eye). Publicación de inferencias por MQTT.
Lo prepara para mañana: IA en el borde (Edge AI) como paradigma industrial: inferencia local sin depender de la nube, latencia mínima, privacidad de datos. TinyML y modelos optimizados para hardware limitado. Visión artificial como sentido primario de robots autónomos. Aceleradores AI (Coral TPU, Hailo) en líneas de producción.
La visión computacional no es una materia aparte — es una herramienta de la IA aplicada. El estudiante no aprende “a procesar imágenes” sino “a darle ojos inteligentes a una máquina.”
- Automatización Industrial: Ing. Mecatrónica · Ing. Electrónica · Ing. Industrial · Semestres 6-8
Diseño e implementación de sistemas automatizados con sensores, actuadores, controladores, y lógica de secuencia industrial.
Aprende hoy: Señales digitales y analógicas a 24V. Sensores de proximidad, presión, presencia. Actuadores: solenoides, motores, válvulas. Lógica de secuencia (estados, transiciones, interlocks). Programación de PLCstamp con lógica de control. Baliza industrial como señalización de estados.
Lo prepara para mañana: Automatización descentralizada: controladores distribuidos que se coordinan por mensajes, no por cableado punto a punto. PLCs virtualizados en edge computing. Gemelos digitales que simulan la planta antes de implementarla. Mantenimiento predictivo basado en datos de sensores.
- IoT Industrial y Comunicaciones: Ing. Electrónica · Ing. Telecomunicaciones · Ing. Sistemas · Semestres 7-9
Protocolos de comunicación industrial, arquitecturas IIoT, diseño de redes de planta, y el flujo de datos desde el sensor hasta el dashboard.
Aprende hoy: Protocolo MQTT: broker, tópicos, QoS, pub/sub. Ethernet industrial y PoE. Arquitectura de red de celda (switch, IPs, uplink). Diseño de mapas de tópicos como contrato de integración. Modbus RTU para dispositivos legacy.
Lo prepara para mañana: Unified Namespace (UNS) como arquitectura de datos de planta. OPC UA sobre MQTT (Sparkplug B). Redes TSN (Time-Sensitive Networking) para comunicación determinística. Ciberseguridad industrial (segmentación de redes OT). Interoperabilidad multi-vendor en ecosistemas abiertos.
- Gestión de Producción e Industria 4.0: Ing. Industrial · Ing. Mecatrónica · Semestres 8-10
Monitoreo de procesos productivos en tiempo real, indicadores de eficiencia, toma de decisiones basada en datos, y la transformación digital de la manufactura.
Aprende hoy: Dashboards en Node-RED con datos en tiempo real. Tiempos de ciclo, contadores de producción, OEE. Alarmas y estados de la celda. Históricos de producción. Visualización de datos de sensores y actuadores.
Lo prepara para mañana: Industria 5.0: la manufactura centrada en el humano. Gemelos digitales para simulación de líneas de producción. Analítica prescriptiva (no solo descriptiva). Sistemas MES/SCADA modernos basados en web. Sostenibilidad industrial medida con datos reales.
- Integración de Sistemas y Arquitectura de Software Industrial: Ing. Mecatrónica · Ing. Sistemas · Semestres 9-10 · Proyecto de grado
La competencia más escasa y más valiosa: hacer que sistemas diferentes trabajen juntos. Diseño de arquitecturas, orquestación, y pensamiento sistémico.
Aprende hoy: Diseño de arquitecturas distribuidas (4 capas I4.0). Orquestación de procesos multi-dispositivo con Python asyncio. Gateway de protocolos (TCP→MQTT). Servicios auto-arrancables con systemd. Documentación técnica de sistemas.
Lo prepara para mañana: Arquitecto de soluciones industriales: el rol más demandado de la década. Microservicios en el borde. Contenedores Docker en controladores industriales. DevOps para OT (GitOps, CI/CD en plantas). La convergencia IT/OT como competencia profesional diferenciadora.
¿Qué incluye?
- Brazo robótico UFACTORY Lite 6 con caja de control integrada, cable Ethernet, adaptador de corriente y botón de parada de emergencia.
- Gripper Lite eléctrico de 2 dedos + Gripper de vacío Lite con cable adaptador para efector final.
- Cámara Luxonis OAK-D PoE con soporte de anclaje superior.
- CM5 montado en riel DIN con software pre-instalado.
- PLCstamp de M5Stack con base Ethernet W5500 y firmware base configurado.
- Pantalla de 15.6 pulgadas con soporte de montaje, cable HDMI y cable USB.
- Switch industrial de 5 puertos Ethernet.
- Inyector PoE 802.3af para alimentación de la cámara OAK-D.
- Fuente Meanwell 24V DC 20A
- Borneras de distribución para conexiones de campo.
- Baliza industrial de 3 colores con poste de montaje.
- Rack de 50×25×25 cm con paneles de acrílico perforado y riel DIN.
- Software pre-instalado: Raspberry Pi OS 64-bit, Mosquitto MQTT, Node-RED con dashboard base, Python con xarm-python-sdk, paho-mqtt y DepthAI SDK, scripts de ejemplo y modelo de detección base para la OAK-D.
- Documentación: guía de inicio rápido, diagrama eléctrico, diagrama de red, mapa de tópicos MQTT, y ejemplos de integración.
- Capacitación inicial de 8 horas (conexión, programación básica del robot, uso del dashboard, estructura MQTT).
Aplicaciones
- Aprendizaje de ROS2 y Programación Avanzada: Al ser nativo en ROS2 y Python, los estudiantes de ingeniería pueden programar trayectorias complejas, cinemática inversa y control de movimientos sin las barreras de los robots industriales tradicionales.
- Integración con Visión Artificial e IA: Conectando una cámara al efector final, los alumnos pueden desarrollar sistemas de clasificación inteligente. Pueden entrenar modelos de Machine Learning para que el robot reconozca y separe objetos por color o forma, dando un propósito real y tangible a los datos que procesan.
- Prototipado de Sistemas Embebidos: Gracias a sus interfaces de comunicación, es la plataforma perfecta para que los estudiantes conecten el robot a microcontroladores y placas de desarrollo. Pueden crear sistemas donde un sensor externo detenga el robot por seguridad, o donde una app móvil controle el brazo en tiempo real.
- Talleres de Automatización y Diseño 3D: Combinando el Lite 6 con impresoras 3D, los estudiantes pueden diseñar e imprimir sus propios efectores finales usando materiales comunes como PLA o PETG. Luego pueden montarlos en el robot para realizar tareas de dibujo, grabado o ensamblaje ligero, haciendo que los conceptos abstractos sean totalmente tangibles.
- Investigación y Desarrollo (I+D) Universitario: Su precisión y su naturaleza de código abierto lo convierten en un caballo de batalla para tesis de grado y proyectos de investigación, permitiendo a los estudiantes publicar resultados reales en robótica colaborativa.
Links de interés
Ejemplo de uso


















Valoraciones
No hay valoraciones aún.